Construction d’une CNC DIY – Partie 2 – Motorisation
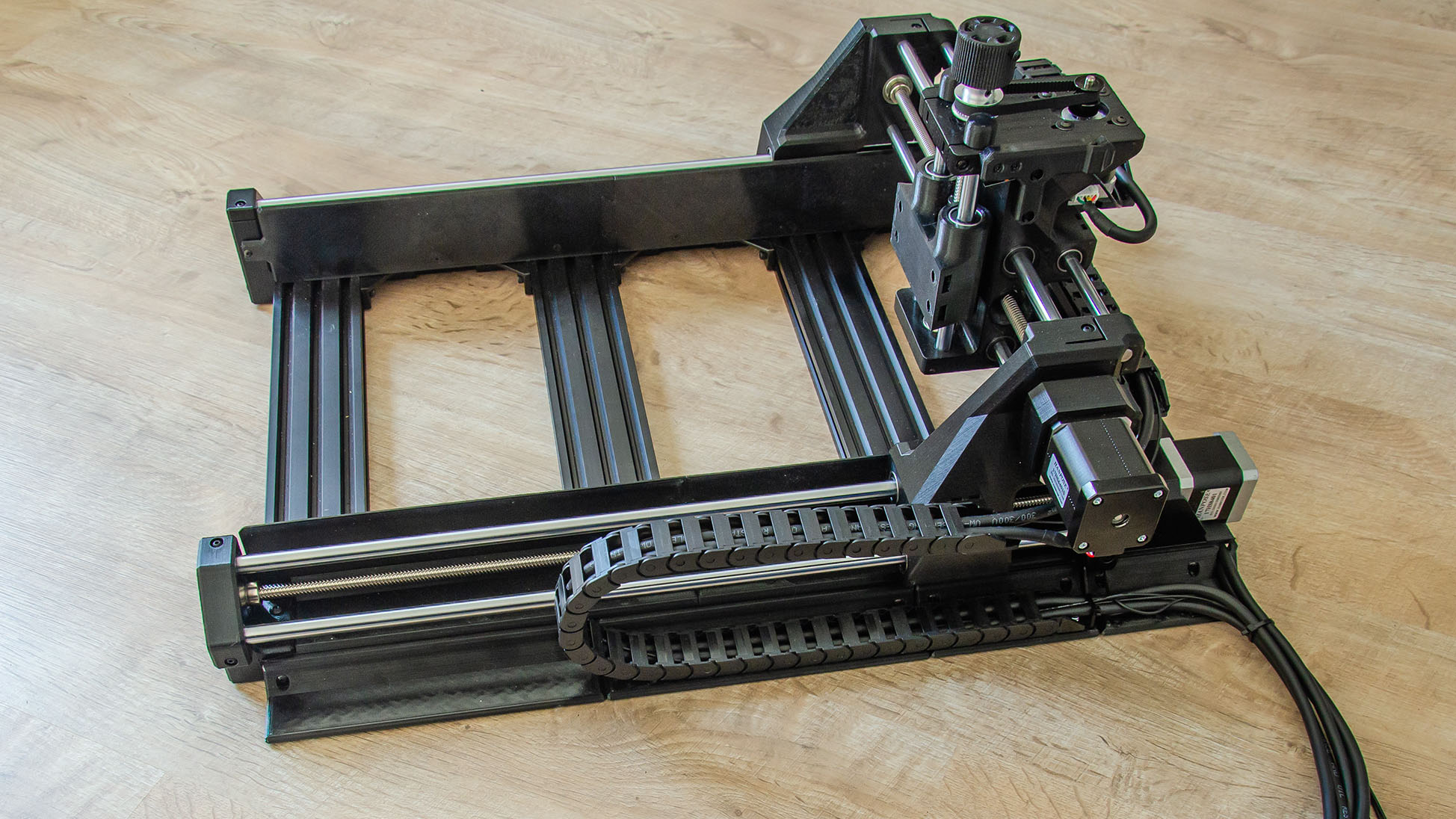
Suite de la construction de la 3D Printed DIY CNC – Dremel CNC Remix de Aviran_N. Dans la partie 1, on avait commencé par fabriquer le plateau de base en profilés aluminium ainsi que les différents chariots mobiles sur les 3 axes. Dans cette partie, on va installer la motorisation et le câblage.
Chaînes porte câble
Axe Y
- 2x Vis M3x16 (support haut / montant)
- 2x Vis M3x12 (support bas / profilé)
- 2x Vis M3x10 tête bombée (support bas / chaîne)
- 2x Vis M3x8 tête bombée (support haut / chaîne)
- 2x Écrous T M3
- 2x Écrous frein M3
- 4x Rondelles M3 étroite
- 1x Chaîne passe câble
Attention de ne pas inverser, les deux extrémités des chaînes n’ont pas exactement les mêmes emplacements des trous.
Axe X
- 2x Vis M3x12 (support haut / Chariot X)
- 2x Vis M3x6 (support haut / chaîne)
- 2x Vis M3x10 tête bombée (support bas / chaîne)
- 4x (ou 6x) Vis M3x8 tête bombée (support bas / profilé)
- 4x (ou 6x) Écrous T M3
- 2x Écrous frein M3
- 2x Écrous carrés M3
- 4x Rondelles M3 étroite
- Les copies imprimées des extrémités de la chaîne passe-câble.
La pièce X cable drag chain support ForPrinting.STL ne rentrant pas sur mon plateau d’imprimante, je l’ai scindé en deux parties [Télécharger le STL : X cable drag chain support_A], chacune avec 3 vis au lieu de 4 au total pour une seule pièce.
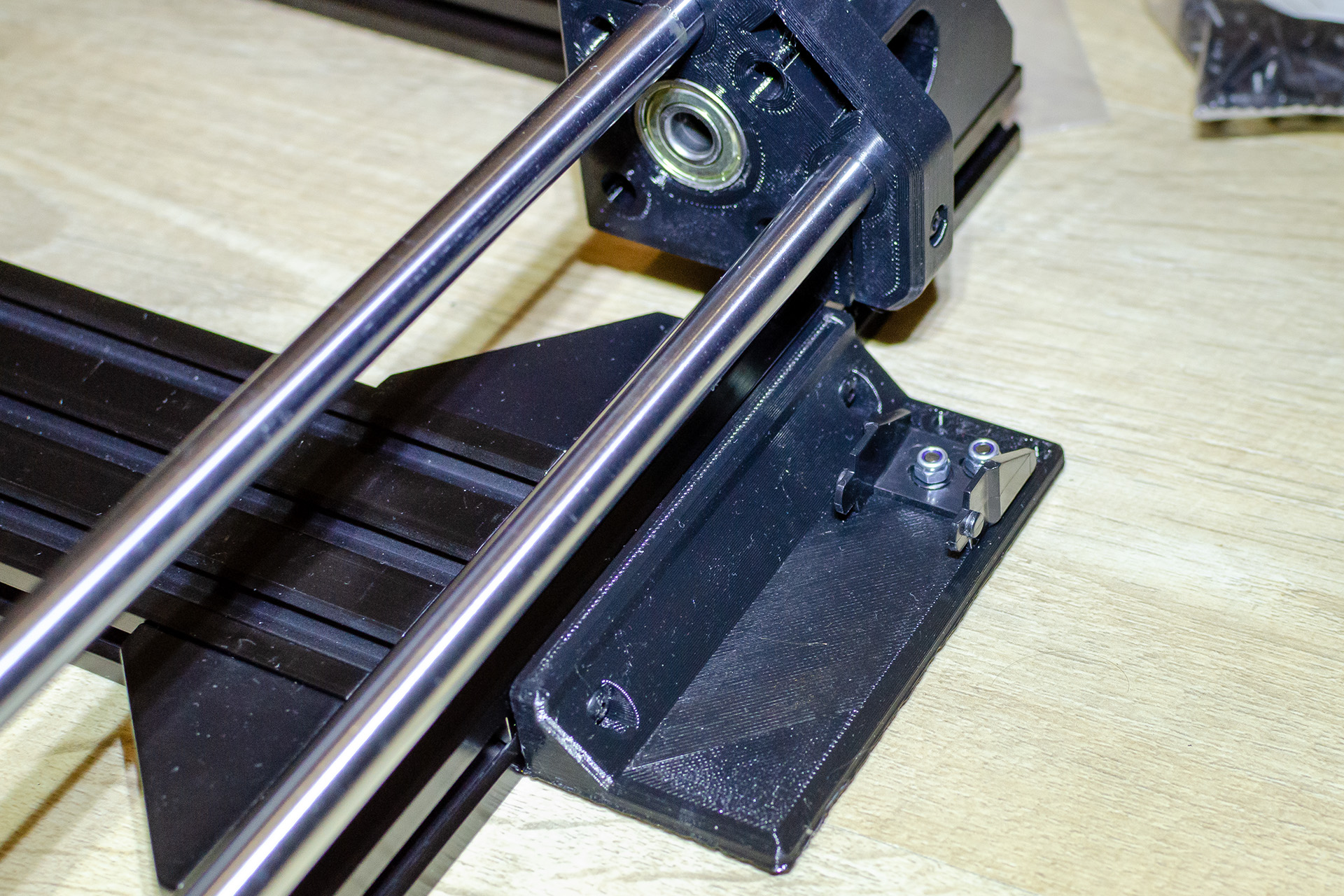
Insérer les écrous carrés dans les slots du chariot X pour y visser le support haut puis l’extrémité de la chaîne.
Visser la plaque par le dessous sur le profilé alu, puis l’autre extrémité de la chaîne sur la plaque.

On peut maintenant répartir le nombre adéquat d’anneaux de la chaîne de part de d’autre pour que l’arrondis qui se forme soit harmonieux et épouse bien la courbure lors des déplacements des axes.
Câblage
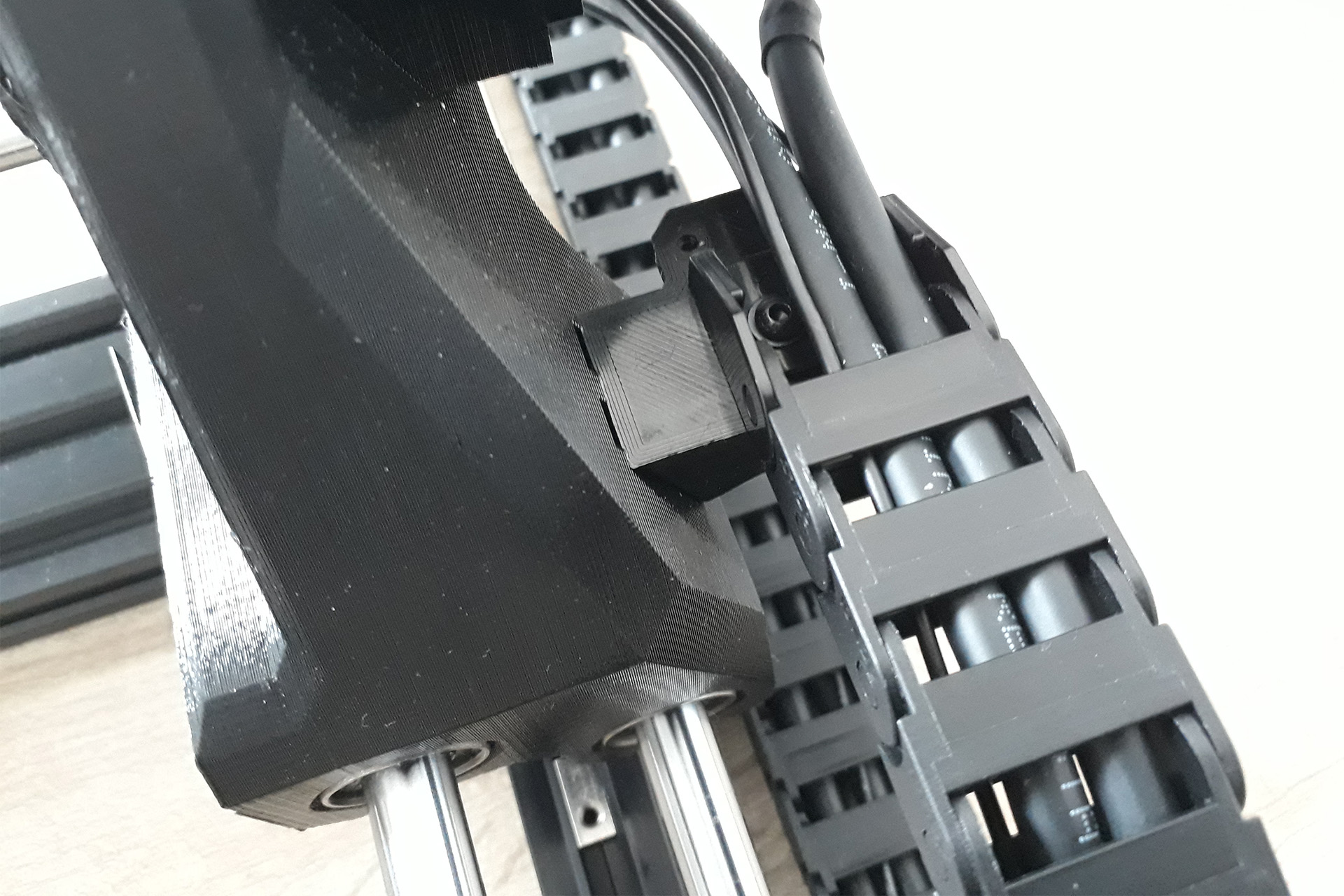
Au fur et à mesure du câblage, j’ai passé chacun d’entre eux dans la chaîne porte câble. Pour les câbles moteur et stop de l’axe Z, ils passent d’abord dans la chaîne de l’axe Y avant de poursuivre leur chemin dans la chaîne qui longe l’axe X.
À noter qu’à cette étape, je n’ai pas encore de routeur et donc que je n’ai pas passé son câble qui prendrai le même chemin que celui du moteur de l’axe Z.
Les vis sans fin ne sont pas encore installées, c’est plus simple de pouvoir bouger les axes manuellement pour l’instant.
Moteurs
- 5m Câble à paires torsadées 4 conducteurs pour moteur pas à pas
- 4x Boîtier connecteurs JST-PH 6 pins mâle + 16 cosses.
- Gaîne thermorétractable
J’ai réparti les 5m entre les différents moteurs pour avoir environ 55cm restant sur chaque câble en direction du boîtier de contrôle :
- X : 1.35m
- Y : 0.95m et 0.65m
- Z : 2m
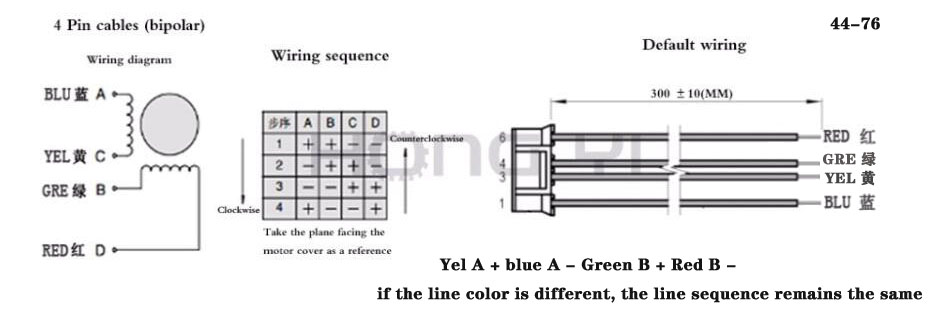
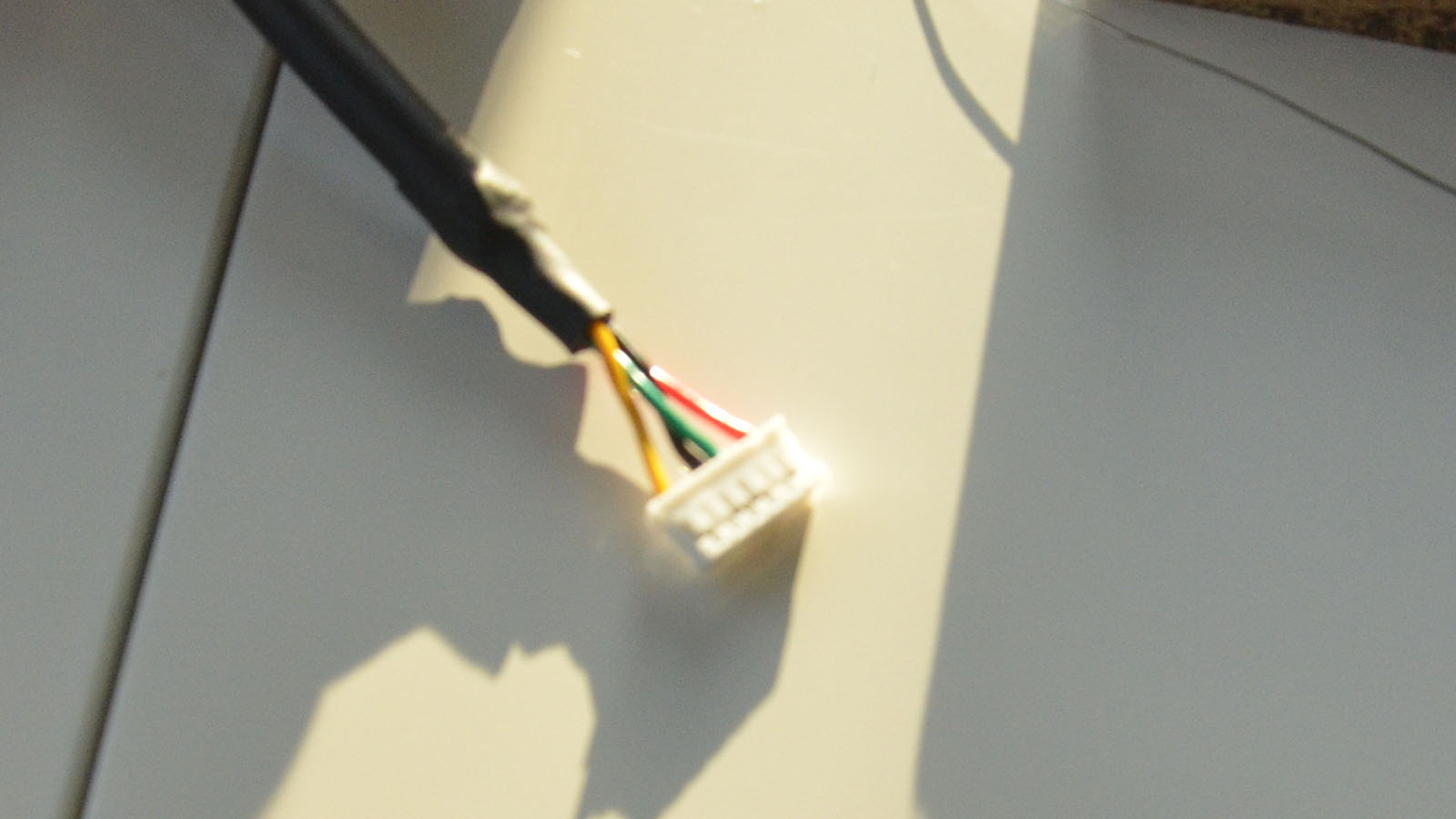
Puis j’ai mis les connecteurs JST-PH à une extrémité de chaque morceau de câble en utilisant une paire torsadée par phase du moteur en suivant le schéma de connexion fournis avec. Le schéma ici est celui des moteurs que j’ai achetés, ça sera peut être différent avec les vôtres. 0/20 pour la mise au point de la photo.
Interrupteurs Stop
- 2x M3x16 tête bombée (capot axe Z)
- 6x M2.5×8 tête fraisée (interrupteurs X, Y et Z)
- 3x Interrupteurs stop
- Câble UL1533-28AWG
J’ai réparti les distances pour avoir également environ 55cm restant sur chaque câble en direction du boîtier de contrôle :
- X : 1.5m
- Y : 0.80m
- Z : 2.15m
J’ai soudé les interrupteurs en place au bout de chaque câble.
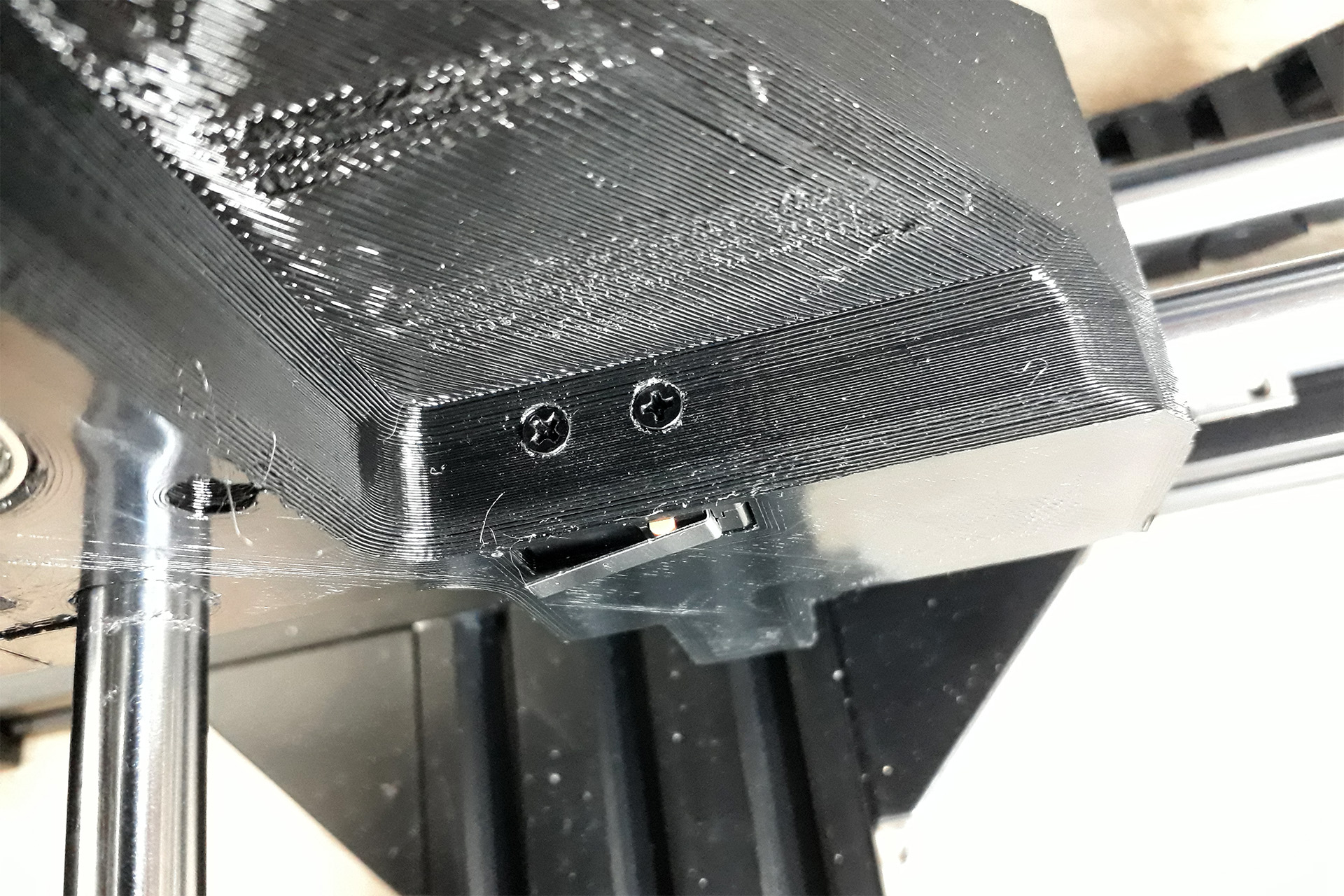
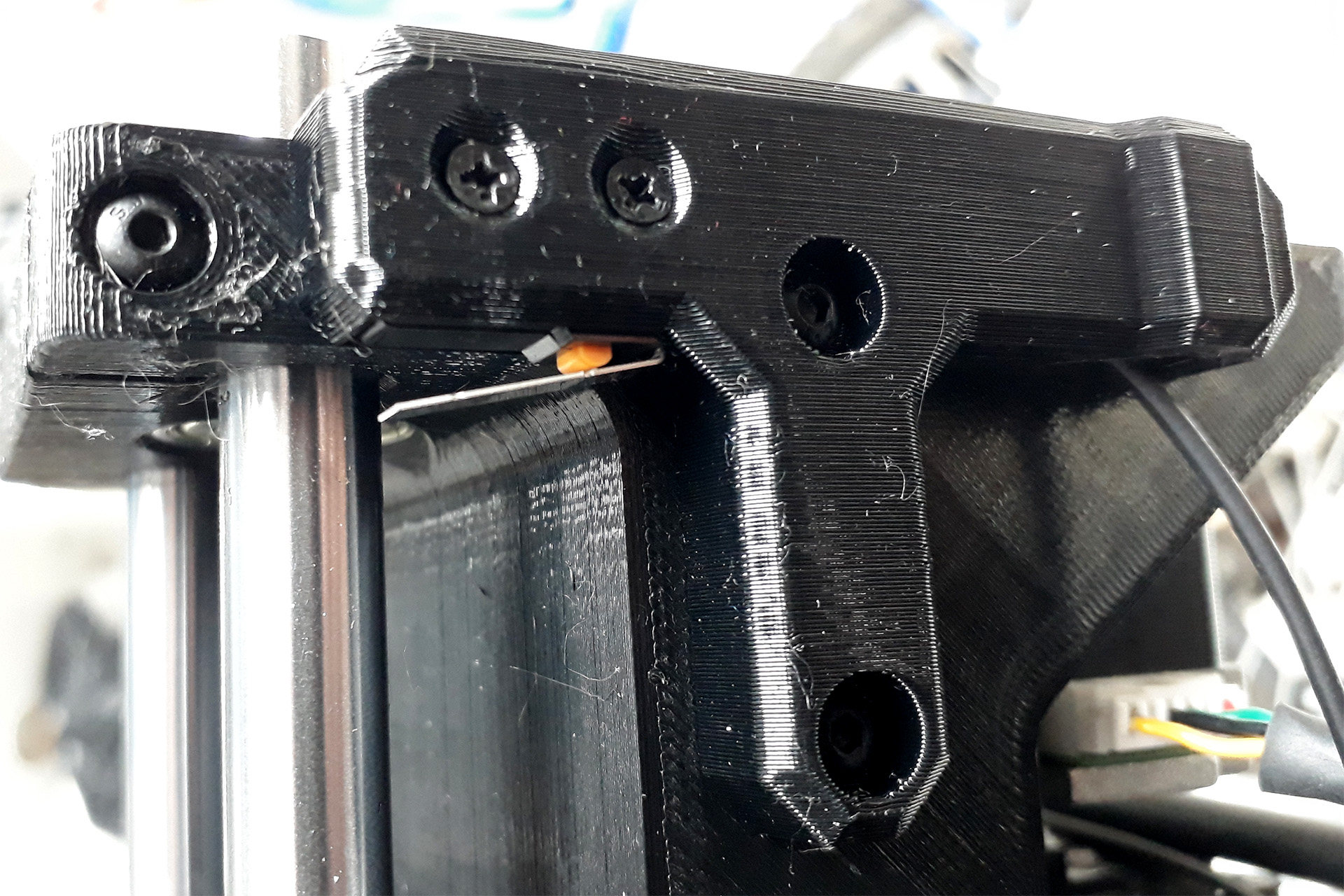
Les interrupteurs stop X et Y ayant un peu de jeu dans leur logement, j’ai percé des trous afin de pouvoir les fixer avec des vis M2.5×8 à tête fraisée. Mes interrupteurs semblent avoir des trous plus adaptés aux diamètre 2.5mm, donc j’ai utilisé des M2.5×8.

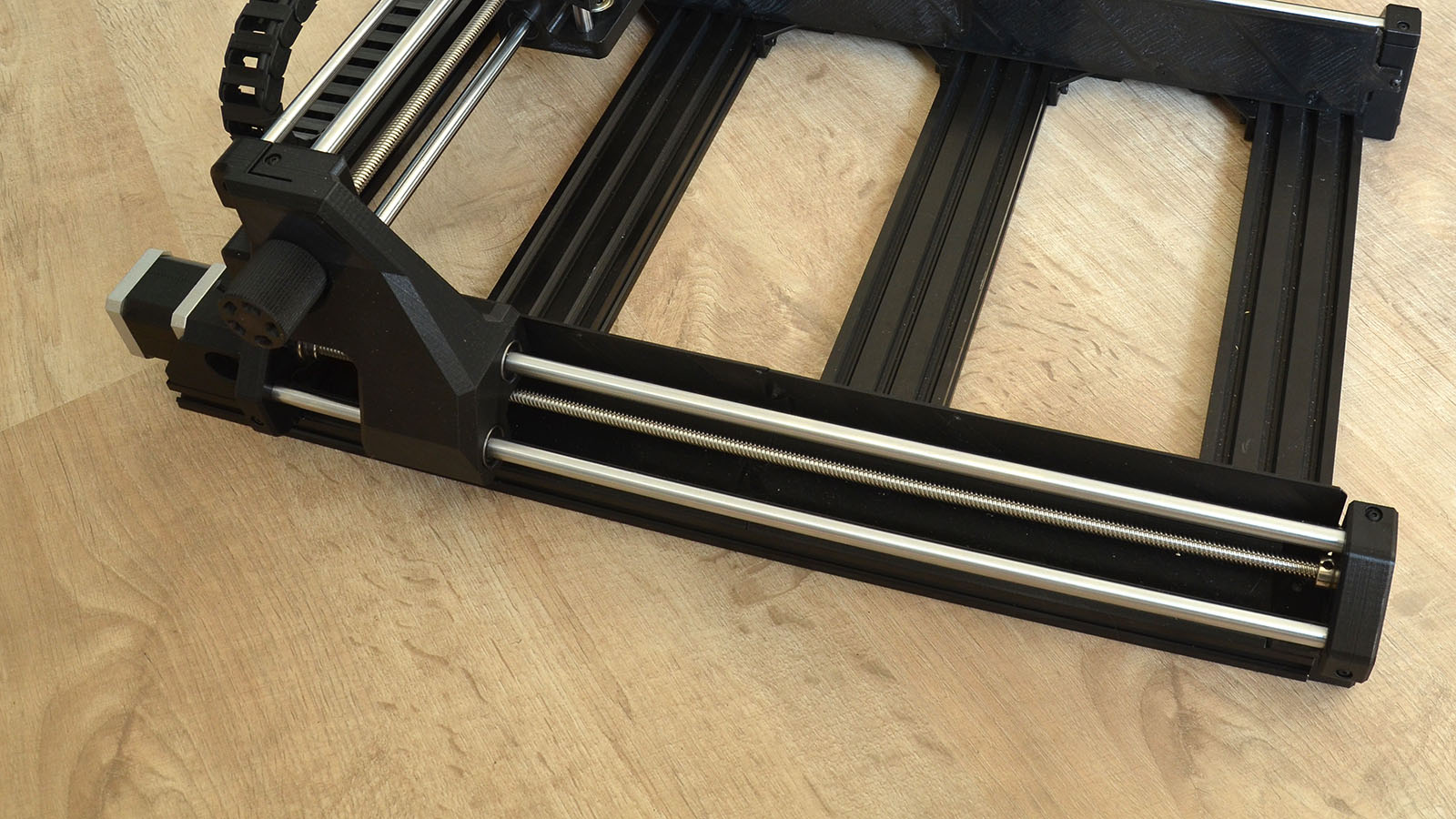
Tiges filetées et moteurs
Axe X
- La tige filetée de l’axe X
- 4x Vis M3x40 (tête cylindrique)
- 1x La seconde partie d’un écrou anti-jeu au pas de 8mm
- 1x Un ressort
- 2x Anneaux bloquants 8mm avec leurs écrous
- 1x Moteur NEMA17 60mm
- 1x Coupleur 5mm/8mm
La tige est insérée par le trou du moteur en insérant progressivement un anneau bloquant, puis l’écrou anti-jeu suivi de son ressort en le vissant jusqu’à ce qu’il affleure. Ensuite on pousse fort jusqu’à l’autre partie (fixée dans le chariot de l’axe) pour compresser le ressort, que les deux parties de l’anti-jeu s’assemblent parfaitement et on fait tourner la tige pour verrouiller le tout.
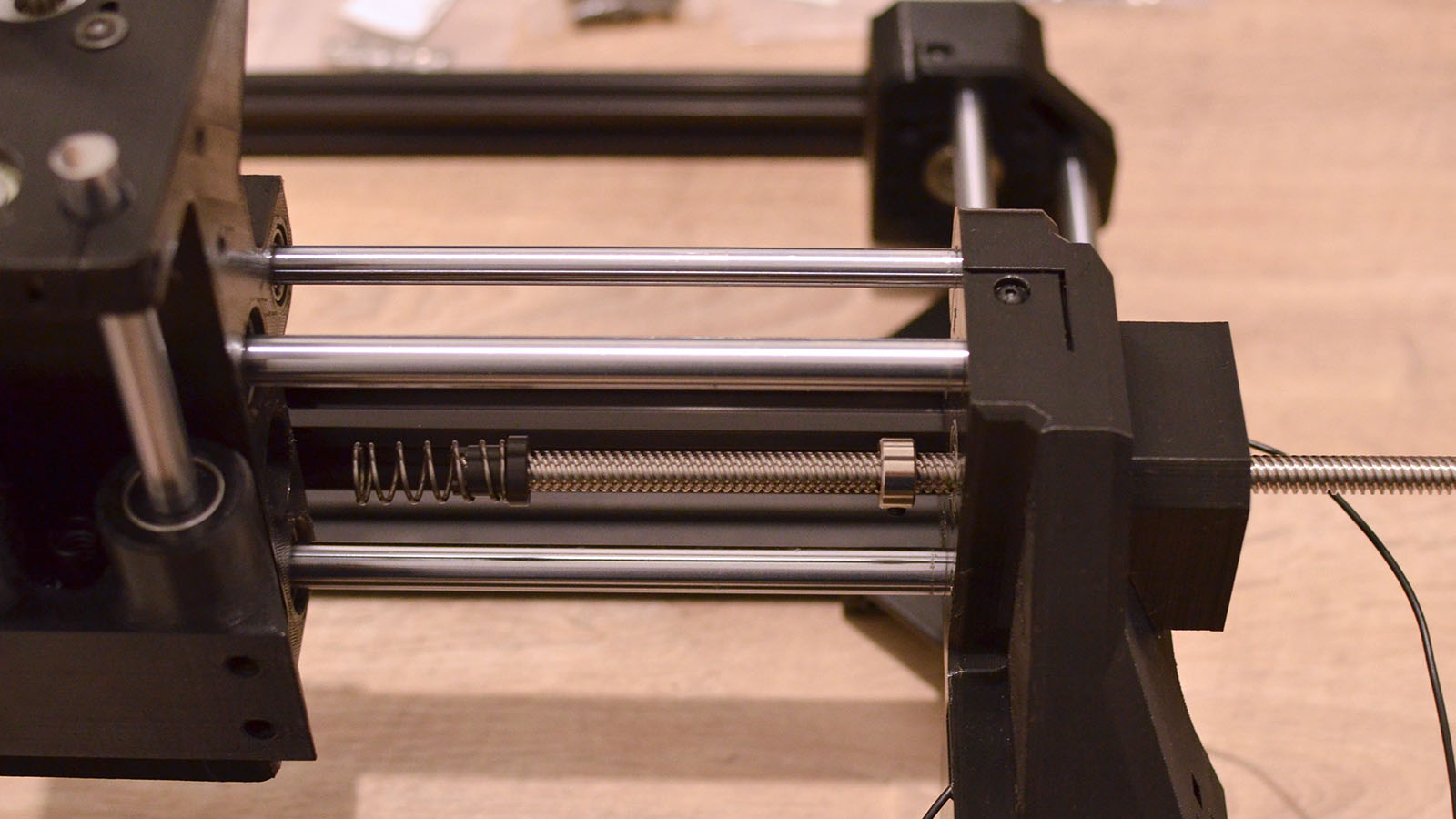
On continue ensuite de visser la tige, une fois ressortie du chariot on y ajoute le deuxième anneau bloquant, et on continue jusqu’à traverser l’autre montant.On peut ensuite fixer le moteur à la tige avec le coupleur 5mm/8mm, et visser le moteur, connecteur vers le bas. À l’opposé du moteur, vient se visser le bouton pour tourner l’axe manuellement (pas encore sur la photo).
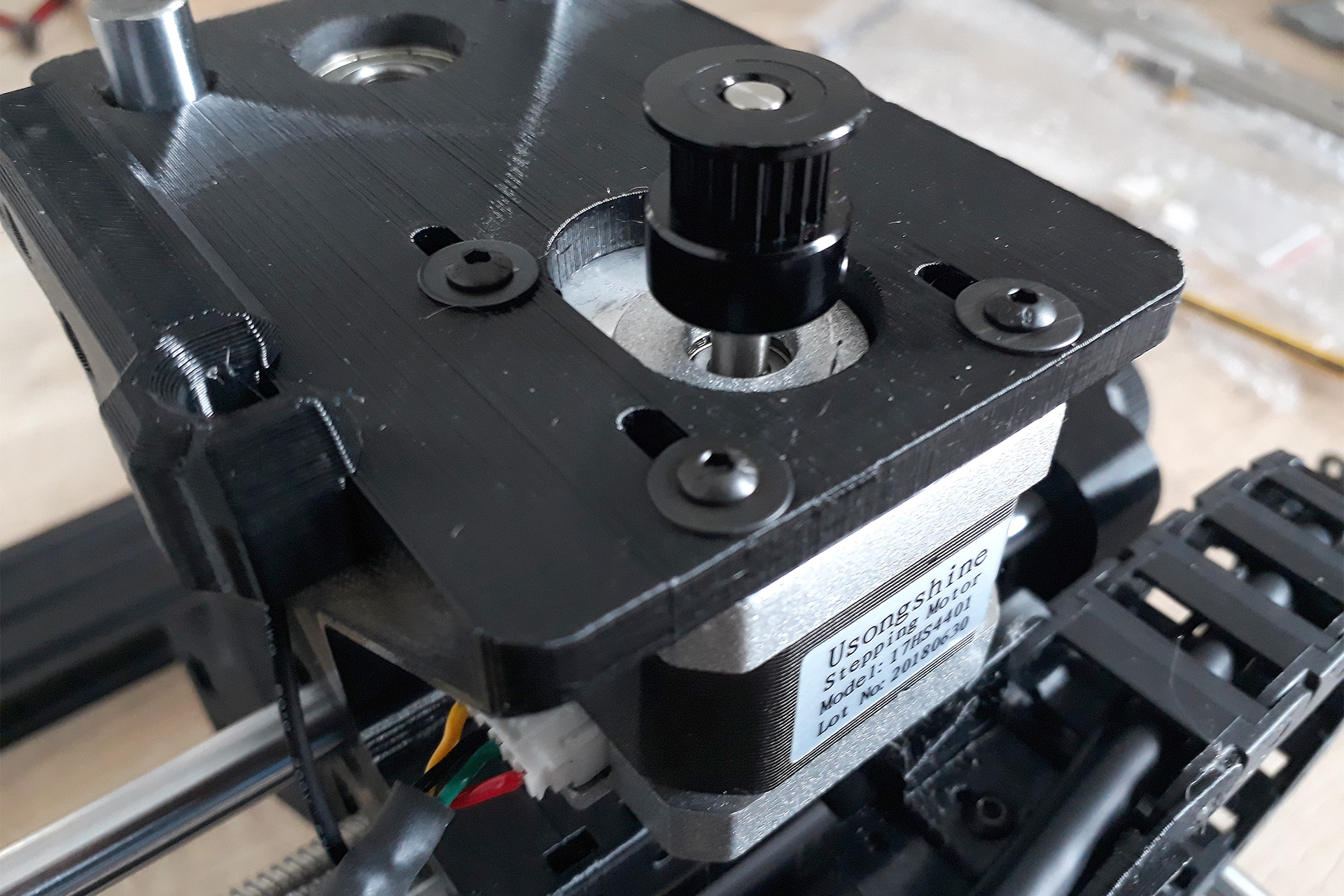
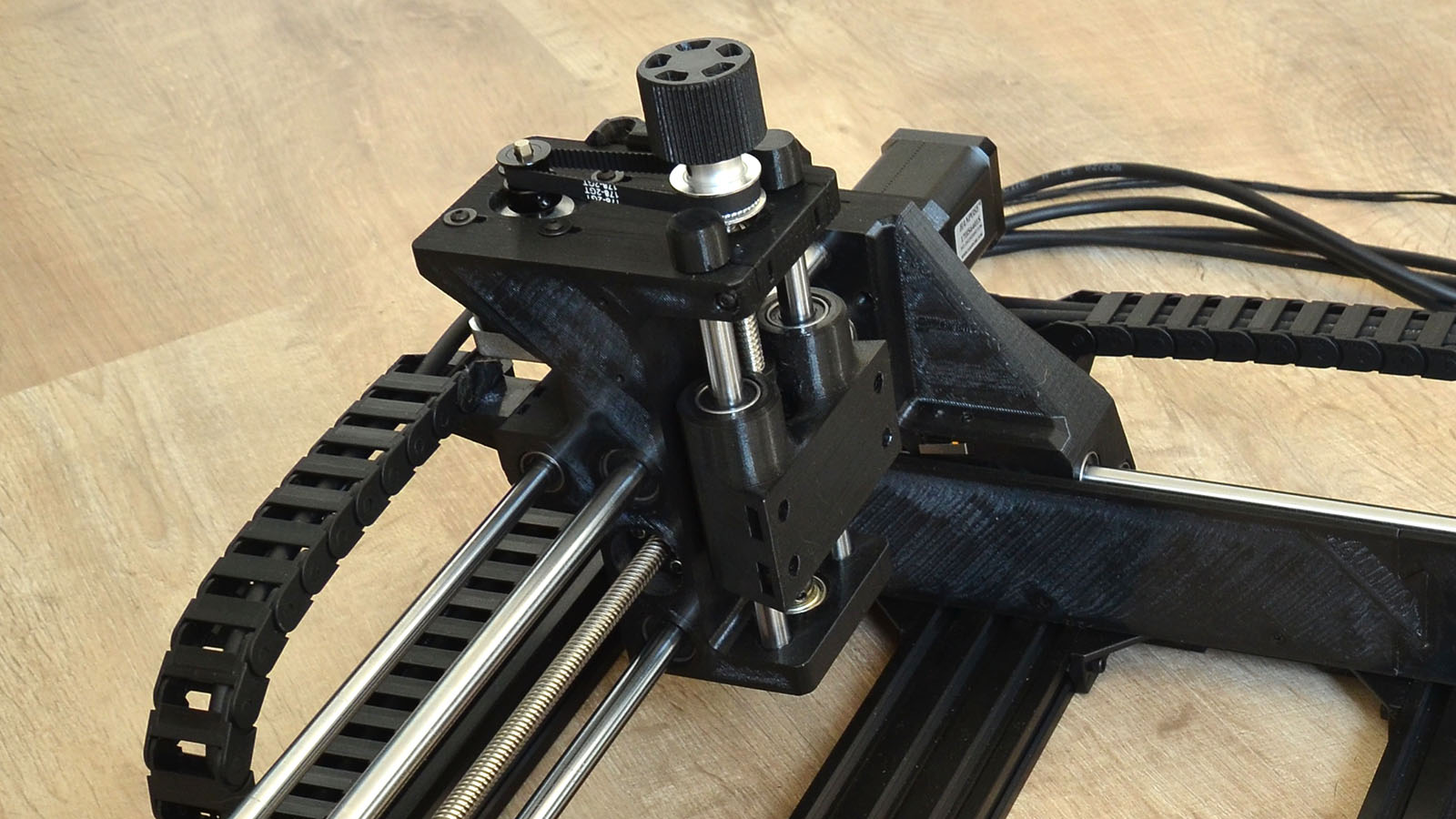
Axe Z
Moteur de l’axe Z
Pour insérer les tige filetée, c’est le même principe que l’axe X mais en finissant par la poulie et le bouton.
- 4x Vis M3x10 pour visser le moteur (tête bombée)
- 4x Écrous larges pour visser le moteur
- 1x Poulie à 20 dents (sur le moteur)
- 1x GT2 Poulie 36 dents (sur la tige filetée)
- 4x Vis sans tête M3x4 (pour serrer les poulies)
- 1x Moteur Nema 17 40mm
- 1x La seconde partie d’un écrou anti-jeu au pas de 2mm
- La tige filetée de l’axe Z
- 1x Un ressort
- 2x Anneaux bloquants 8mm avec leurs écrous
- 1x La courroie
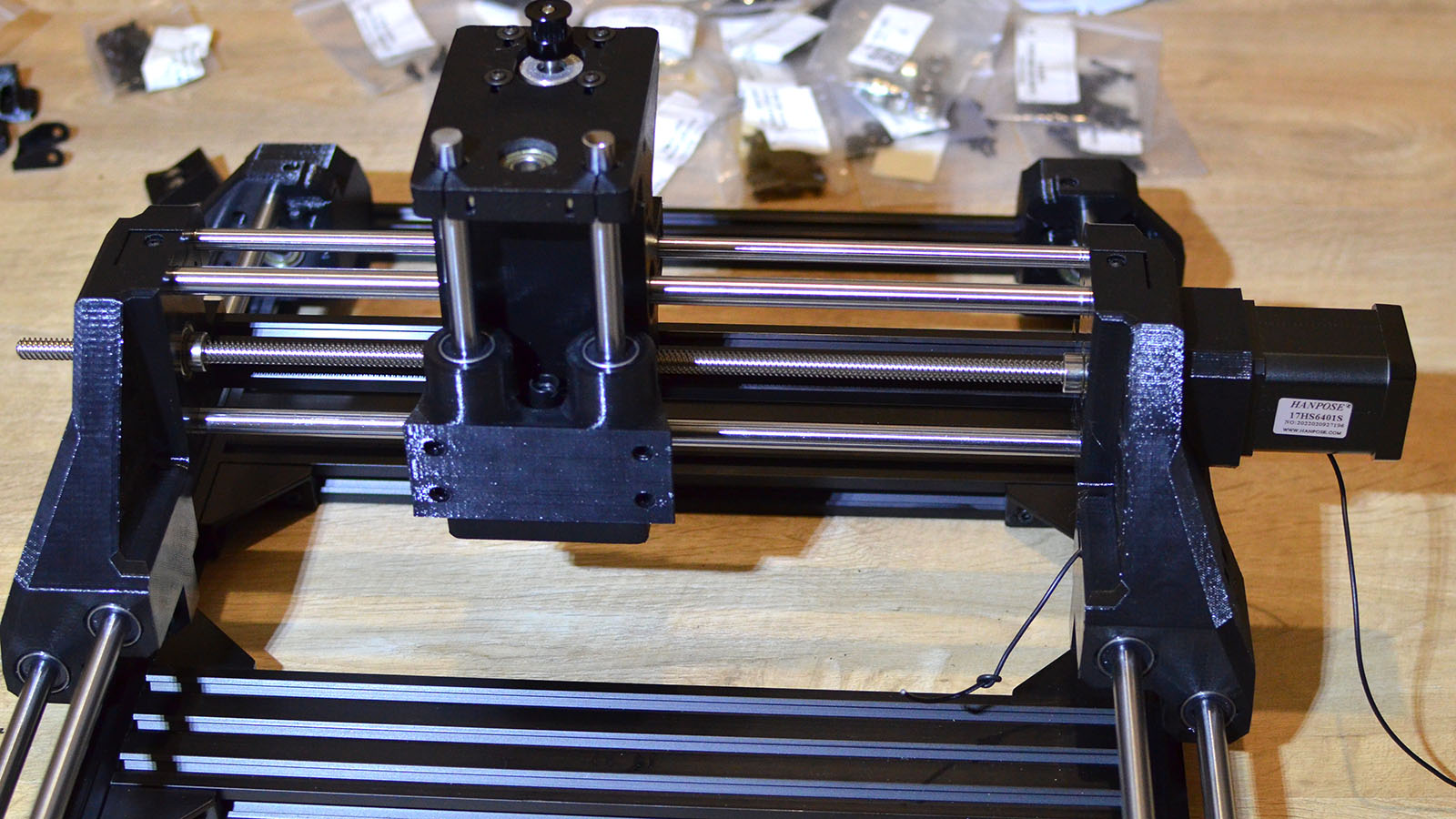
Axe Y
- 2x Tige filetée de l’axe Y
- 8x Vis M3x30 (tête cylindrique)
- 2x La seconde partie d’un écrou anti-jeu au pas de 8mm
- 2x Un ressort
- 4x Anneaux bloquants 8mm avec leurs écrous
- 2x Moteur NEMA17 48mm
- 2x Coupleur 5mm/8mm
Quasiment le même principe que pour l’axe X, sauf que la tige traverse d’abord la partie de l’écrou anti-jeu qui est dans le chariot avant d’ajouter le ressort et la seconde partie. La petite difficulté supplémentaire c’est d’être synchro sur les deux axes Y pour que le chariot ne parte pas en diagonale. On peut ensuite fixer les moteurs aux tiges filetées avec le coupleur 5mm/8mm, et visser les moteurs, connecteur vers le bas.
Pare-poussière
Les fichiers originaux ne rentrant pas sur le plateau de ma Prusa i3MK2, je les ai modifiés pour qu’ils rentrent en diagonale du plateau en allongeant un morceau et en raccourcissant l’autre. J’en ai profité pour ajouter des trous pour des vis M3x6 à têtes fraisées pour renforcer la liaison entre les morceaux haut et bas. [Télécharger les fichier STL : remix-dust]
Cette étape peut être réalisée après la mise en route de la machine car il faudra déplacer le chariot sur l’axe Y afin d’accéder à l’ensemble des vis pour fixer les morceau du bas sur le chassie en aluminium.
- 12x M3x10 tête fraisée (bottom* sur chassie)
- 12x écrous T M3 (bottom* sur chassie)
- 12x M3x6 tête fraisée (top* sur bottom*)
- 4x Vis M3x10 (supports arrière et fixations avant)
- 2x écrous M3 (supports arrière)
- 2x écrous M3x8 tête fraisée (supports arrière)


Petites améliorations
Dans la continuité du support de la chaîne porte-câble, j’ai ajouté un support afin de fixer la sorties de tous les câbles de la machine sur le côté arrière, ainsi qu’un cache arrière pour le câble d’un des moteurs de l’axe Y. Un support similaire vient se glisser sous la chaîne porte câble également. [Télécharger les STL : upgrade-cables].

One thought on “Construction d’une CNC DIY – Partie 2 – Motorisation”